About Me.

Autonomy
Robots doing what they do.
Artificial Intelligence
Time to make things smart.
Hardware
Mechanical and electrical stuff.
Autonomy

Bidirectional Temporal Traffic Path Planner for Fleet AMRs
Hyundai (HMGICS) Internship 2024
Underwater autonomous navigation and control stack using computer vision (OpenCV) with object detection-potential field based navigation for object tracking/avoidance.

Autonomous Maze Exploration SLAM and Object Tracking
SUTD 30.119 Intelligent Robotics
Autonomous Exploration Simultaneous Localization and Mapping (SLAM) and solving of an unknown maze and object detection (YOLOv11) and custom tracking algorithm.
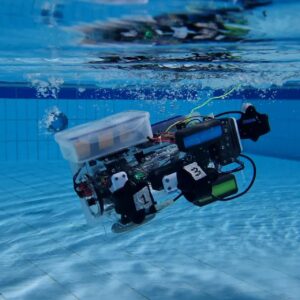
Autonomous Underwater Vehicle (AUV) Navigation
SAUVC 2022/2024
Underwater autonomous navigation and control stack using computer vision (OpenCV) with object detection-potential field based navigation for object tracking/avoidance.

Autonomous Prime Mover (APM) Simulation
Venti Technologies Internship 2023
Simulation of APMs with accurate vehicle dynamics and realistic scenarios. Development of controls and analysis of APM simulations. Implementation physics engines for improved simulations.
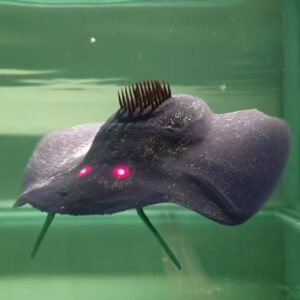
Autonomous Underwater Batoid Robot Controls
SUTD SHARP 2022
Nature-inspired sinusoidal fin motion control (X, Pitch, Roll) and strain gauge-based obstacle detection using digital signal processing of underwater batoid robot.
Artificial Intelligence

Autonomous Indoor Navigation using CNN and RGB-D Input
A*STAR Internship 2019
Autonomous indoor navigation of a Pioneer P3Dx mobile robot base using RGB-D video and pose-goal vector inputs to an end-to-end CNN that outputs motor velocity commands.
Automated BiLSTM-DistilBERT Movie Review Sentiment Analysis
SUTD 50.040 Natural Language Processing 2024
Classification of IMDA movie reviews of positive/negative sentiment categories using BiLSTM-DistilBERT model with ~96% accuracy.

DL-based Visual Odometry for Autonomous Vehicles
SUTD SHARP 2023
Implementation and evaluation of various DL-based VO methods in rain such as DROID-SLAM. Contributed as co-author for paper published in IEEE CASE 2023 (Submission 542).

Automated Sequence Labelling of Informal Text Labels using HMM
SUTD 50.007 Machine Learning 2024
Developed HMM using first and second-order Viterbi algorithm for sequence labelling of informal text excerpts taken from news reports. Entity and sentiment predictions performed by model.
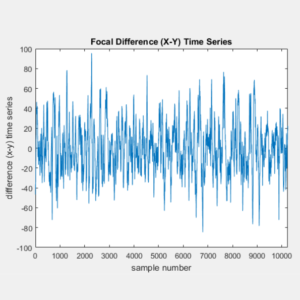
Diagnosis of Epileptic EEG signals using LSTM-CNN
NP Final Year Project 2019
Developed novel LSTM-CNN to classify focal epileptic EEG signals with ~87% accuracy. Contributed as co-author for review paper published in FCGS 2019 (DOI: 10.1016/j.future.2018.08.044).
Hardware

TROLL-E Smart Foldable Electrical Grocery Trolley
SUTD 30.007 Engineering Design Innovation 2023
Developed electronics and controls of TROLL-E for active slope-based actuation control and custom PCB with integrated dynamic air cooling. Custom anti-roll basket designed.

Variable Length Fluid Pipe Leak Detector using Electromagnetism
SUTD 30.102 Electromagnetics & Applications 2023
Designed a low-cost and economical fluid pipe leak detector with Bluetooth capabilities that uses electromagnetic conduction principles for detection.

Teleoperatable Quad-Rotor Helicopter
Personal Project 2023
Designed and build a quadcopter capable of teleoperable flight. Used basic mechanical and electronic components that are easily obtainable for a low-cost drone built in a lab.

Electric Go-Kart
Electric Vehicle Club 2021
Built an electric go-kart which is able to move simplistically, safely, and reliably within university campus.
8-Bar Cube Frame Lifting and Manipulation Robot
Asia Pacific Vex Robotics Championship 2014
Designed and build robot using 8-bar lifting mechanism and a novel intake to collect and deposit cube frames for international competition. Won Best Design Award