NP Research · Published
Focal EEG Signal Characterization for Epilepsy Diagnosis
Extracted and benchmarked 9 nonlinear feature families (MMSE, RQA, DFA, entropies, FD, Hjorth, Hurst, LLE, LZC) from 7,500 focal/non-focal EEG signals (Bern-Barcelona database). LS-SVM (polynomial-3) with 10-fold CV achieved 87.93% accuracy, 89.97% sensitivity. MMSE ranked highest by t-test significance. Published in FGCS, Elsevier.
LS-SVMEEGNonlinear FeaturesMMSERQAMATLAB
Mar 2018 – Aug 2019
Diagnosis of Epilepsy using AI and EEG Signals
NP Final-Year Project · Learning · Published in FCGS
- Extracted and compared 9 nonlinear feature families — Modified Multi-Scale Entropy (MMSE, 10 scales), Recurrence Quantitative Analysis (12 RQA parameters: laminarity, determinism, trapping time, etc.), Detrended Fluctuation Analysis, sample/approximate/fuzzy/Kolmogorov-Sinai/Renyi/Shannon/Tsallis/wavelet/permutation entropies, Fractal Dimension, Hjorth parameters, Hurst exponent, Largest Lyapunov Exponent, Lempel-Ziv Complexity, and bispectrum entropies — yielding 52 individual features all with p < 0.01.
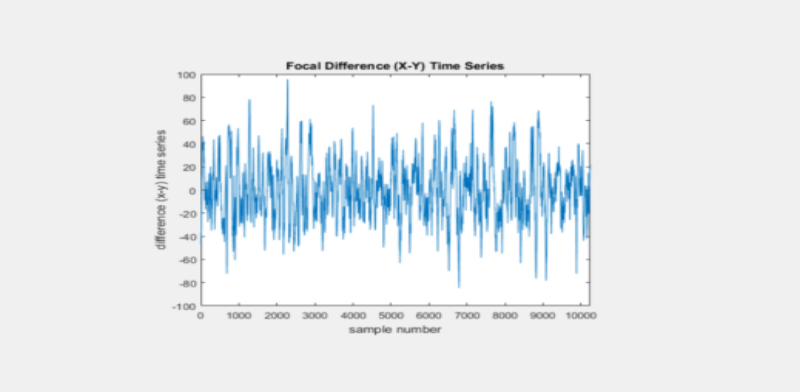
- Analyzed 3,750 focal + 3,750 non-focal EEG signals (N=10,240 samples each) from the Bern-Barcelona intracranial EEG database (5 patients with pharmacoresistant temporal lobe epilepsy). Performed X-Y differencing to obtain bivariate difference series before feature extraction.
- Classified using LS-SVM (polynomial-3 kernel) with 10-fold cross-validation, achieving 87.93% accuracy, 89.97% sensitivity, 85.89% specificity using the top 23 features. MMSE at scale E10 ranked highest by t-test, confirming that focal EEG signals exhibit more periodic, less random behavior than non-focal signals.
- Proposed recurrence, bispectrum, and cumulant plots as visual discrimination tools: focal recurrence plots appear more periodic and homogeneous; focal bispectrum shows larger, more consistent peak amplitudes — providing clinicians with intuitive visual markers alongside quantitative features.
- Contributing author on review paper published in Future Generation Computer Systems (FGCS), Elsevier, 2019. DOI: 10.1016/j.future.2018.08.044.
EEG Signal Processing,Nonlinear Feature Extraction,Modified Multi-Scale Entropy,Recurrence Quantitative Analysis,Detrended Fluctuation Analysis,LS-SVM,10-Fold Cross-Validation,Fractal Dimension,Hjorth Parameters,Hurst Exponent,Lyapunov Exponent,Lempel-Ziv Complexity,Bispectrum Analysis,TensorFlow,MATLAB,Data Analysis,Biomedical AI,Classification,Statistical Testing